Page Not Found
Page not found. Your pixels are in another canvas.

A list of all the posts and pages found on the site. For you robots out there is an XML version available for digesting as well.
Page not found. Your pixels are in another canvas.
About me
Published:
A fun demo of OpenAI’s whisper model to trick-or-treat with some robots. 
Published:
As part of my PhD work, I designed an embedded pressure control system called PneuDrive for use on a large scale soft robotic torso. 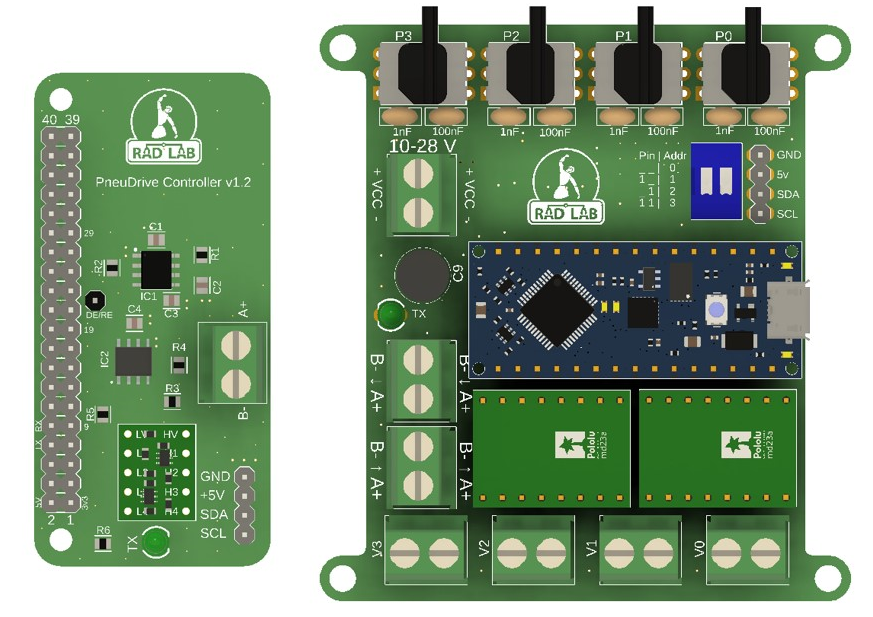
Published:
I was hosted by Dr. Egidio Falotico in the Brain-Inspired Robotics Lab. 
Published:
Overview of my recent defense of my PhD research proposal.
Published:
I just finished reading Skunk Works by Ben Rich. I enjoyed the book and learned quite a lot about the development of stealth technology during the Cold War.
A gantry robot uses stereo vision to catch a baseball pitch. 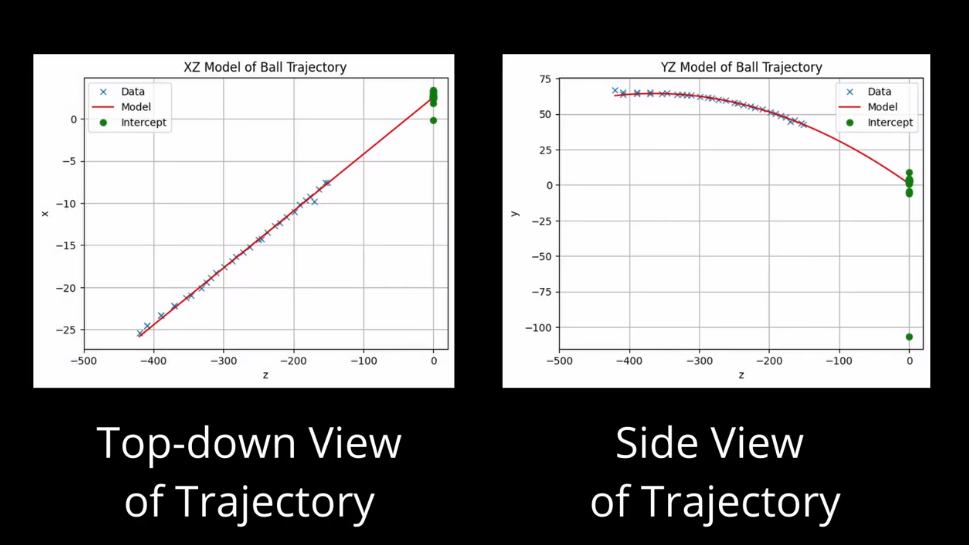
For this project, I trained a CNN based on the UNET architecture on a database of labelled cancerous cell images. The goal was to predict cancer with >85% accuracy.
Trained an RNN on State of the Union Adresses to predict sentences given a few letters.
Modeling, simulation, control, estimation, and path planning for a fixed wing UAV. The final result of the project is a simulator built from scratch with implementations of IMU, pressure, and GPS sensors, Extended Kalman Filter and RRT path planning. 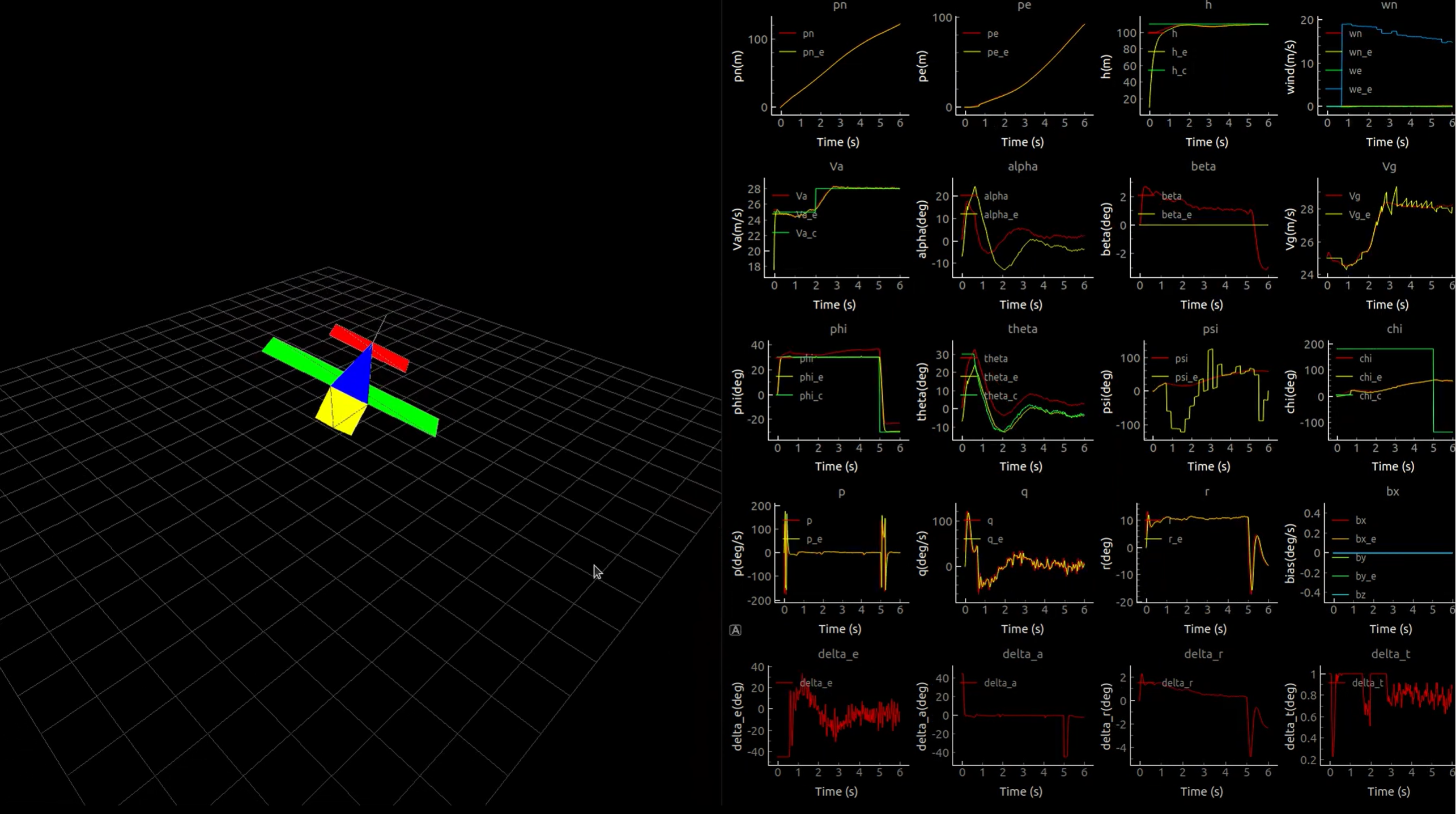
This project uses SIFT feature matching and some computer vision techniques to automatically grade scantrons. 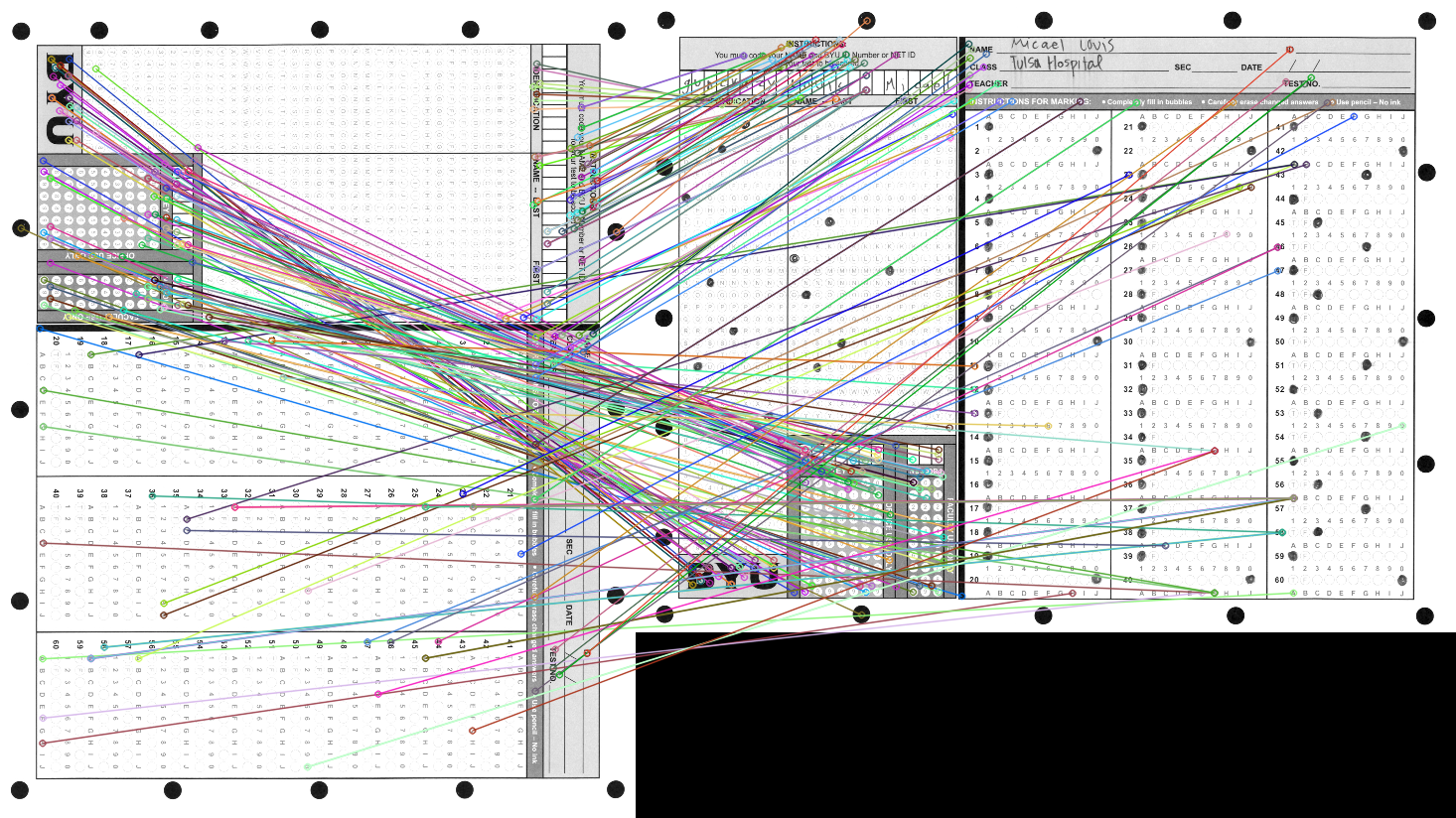
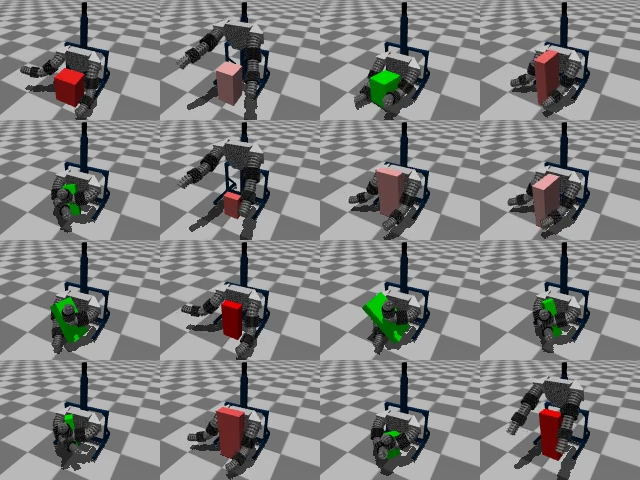
A novel way to simulate soft continuum robots in MuJoCo. 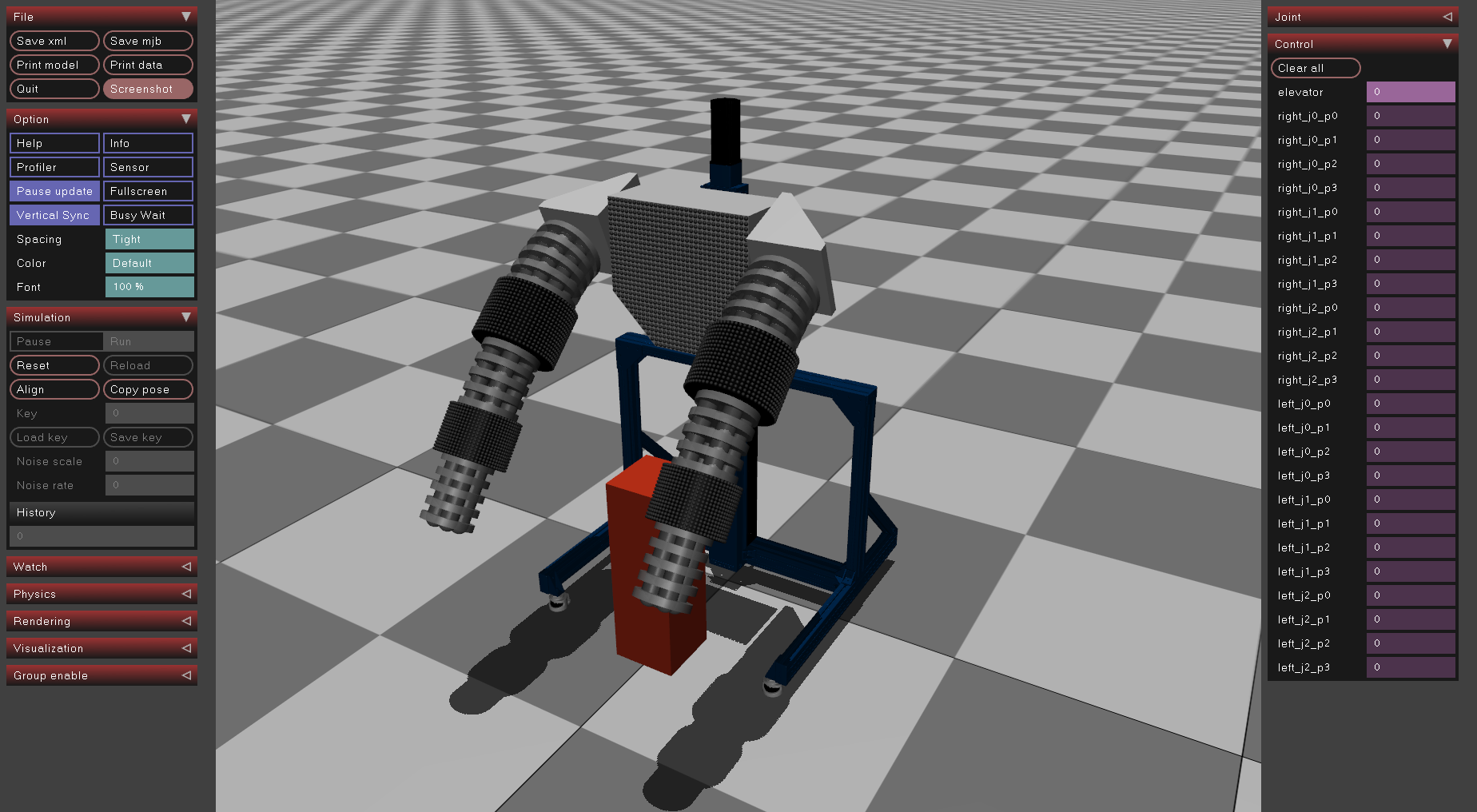
An embedded pressure control system I designed for low-level control of pneumatic robots.
SIFT Feature extraction and detection for real-time image replacement. 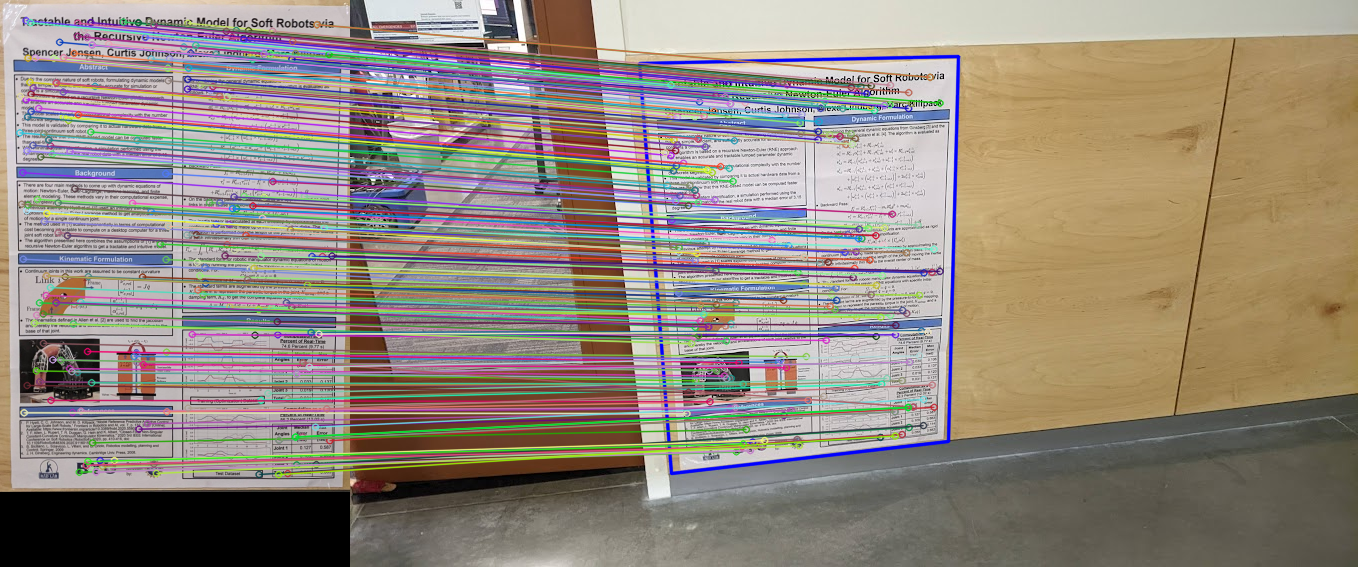
Our team used a combination of computer vision, controls, and reinforcement learning to autonomously navigate a mini city. Our car is capable of recognizing and responding to signs, stopping at rail road crossings, and staying on the road.
Various implementations of localization and mapping algorithms. 
A sensor I developed to give robots a sense of touch over their entire structure. 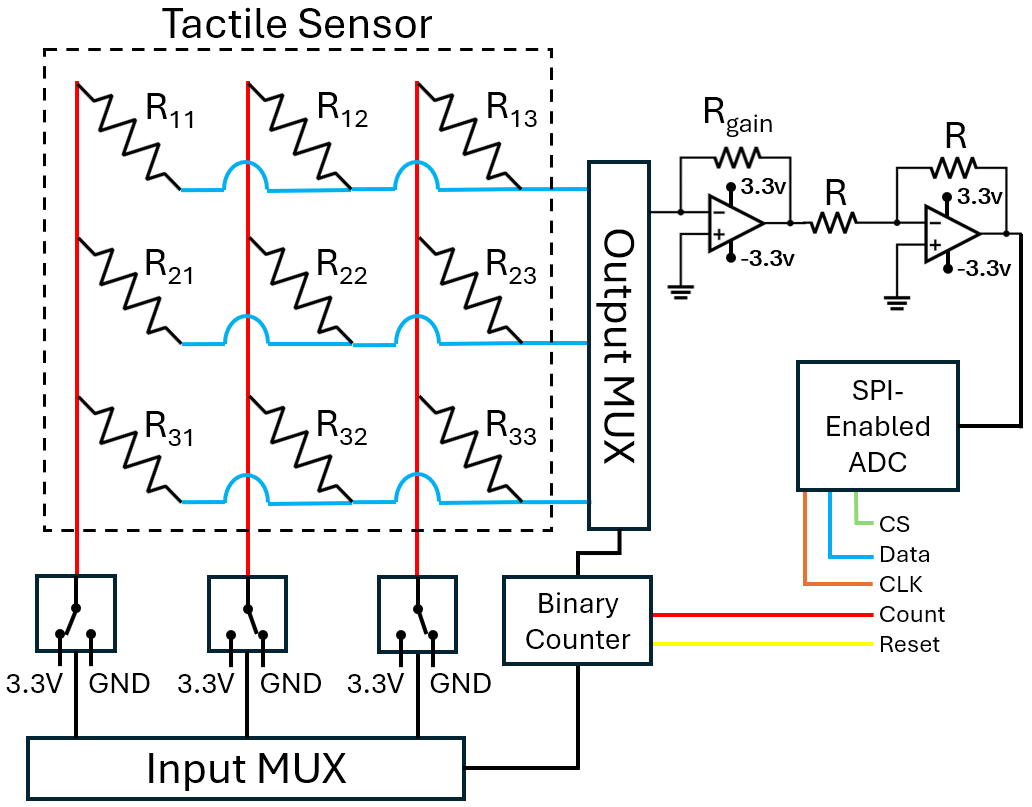
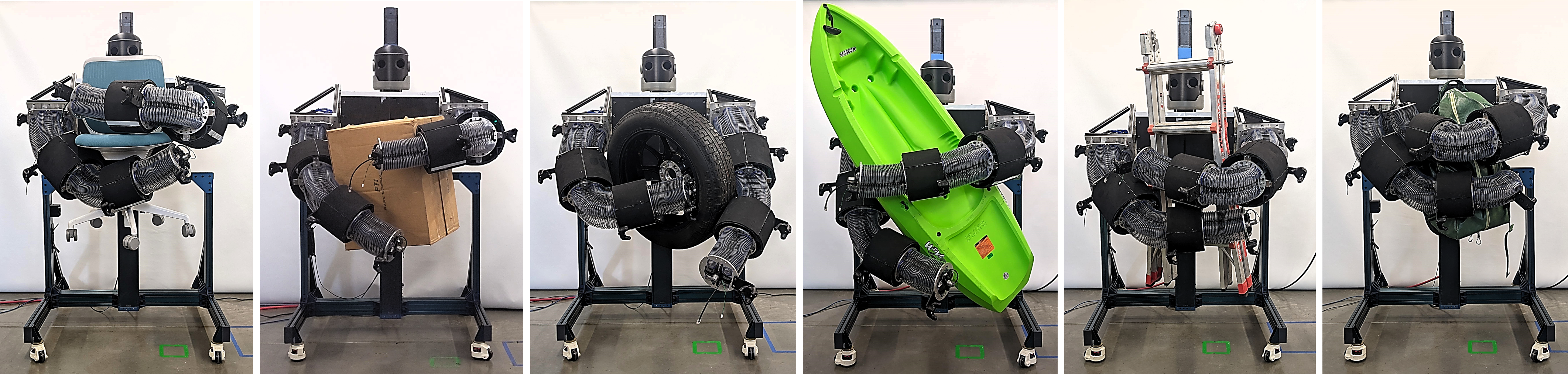
Baloo is a prototype robot I designed and built to work on whole-body manipulation research.