
Large Area Tactile Sensing
Robotic manipulation research aims to enhance robot capabilities in unstructured environments, where objects vary greatly. Tactile sensing plays a crucial role, as cameras often struggle with occlusion or delicate handling tasks. While additional cameras can address occlusion, this approach does not scale well for open-world manipulation. Tactile sensors, akin to human touch, provide critical information that vision cannot capture.
Typically, tactile sensors are exclusively located at the robot’s end effector, offering high-resolution measurements over small areas.
Our work introduces a novel large-area tactile sensing solution designed for whole-arm manipulation. This approach extends sensing capabilities beyond the end effector, enabling robots to handle unpredictable contact patterns across broad surfaces.
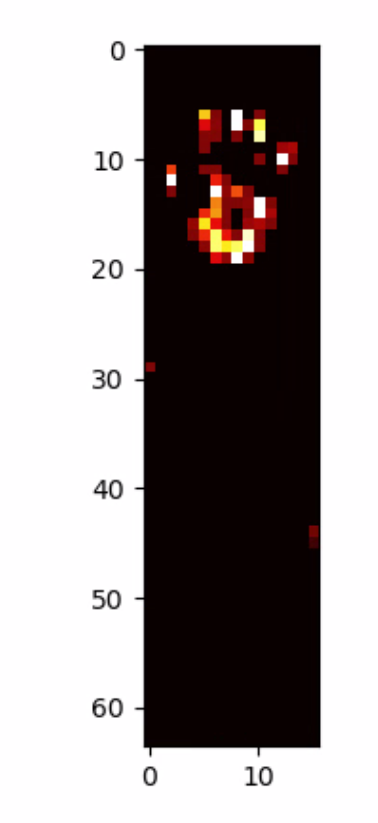
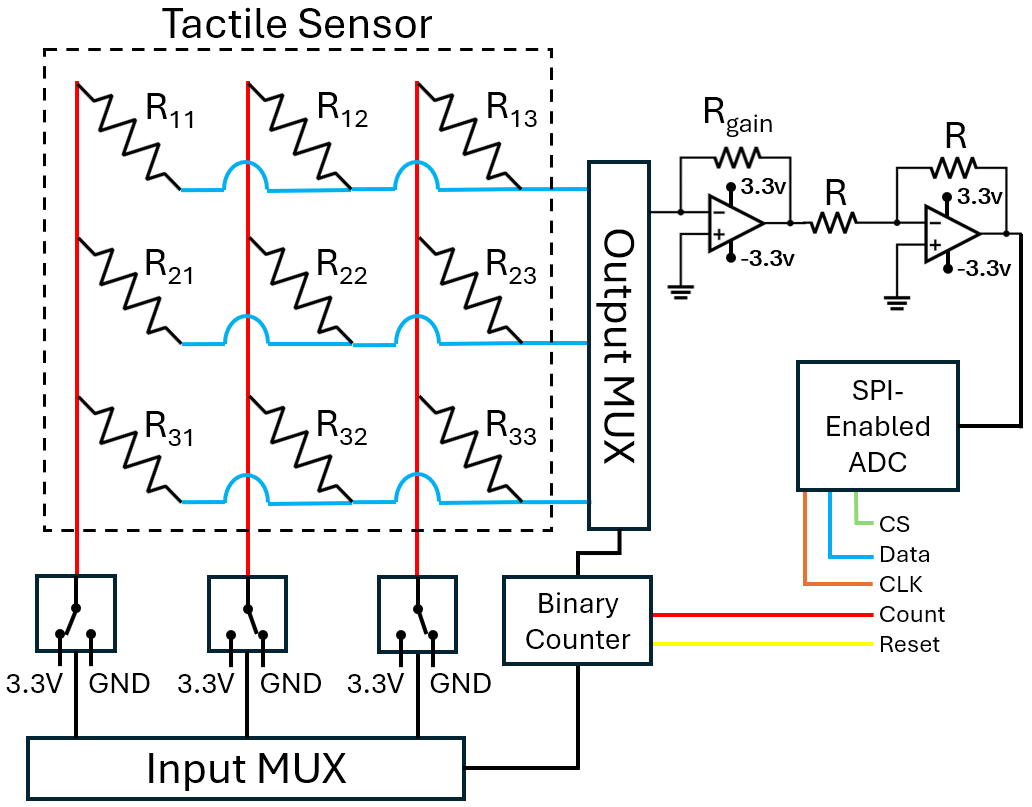
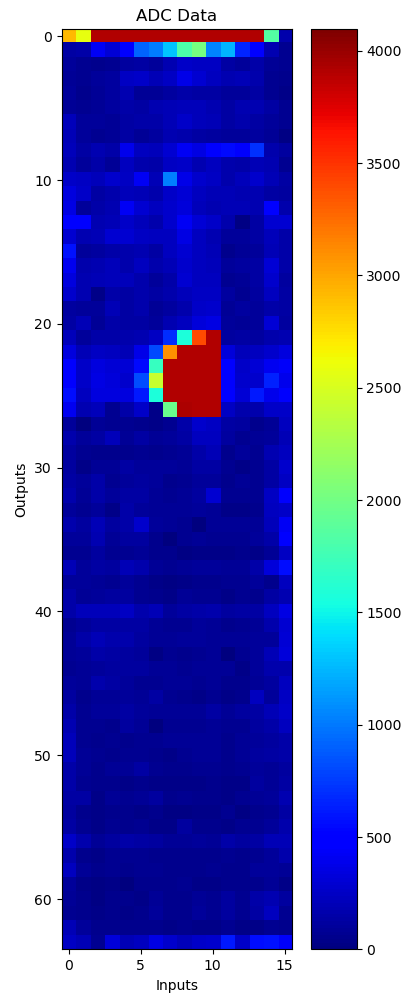
The sensor works by measuring the resistance between a conductive layer and a grid of electrodes. When an object contacts the sensor, the resistance changes, providing information about the contact location and pressure.
These sensors can be mounted on a robots structure and help with tasks that might be difficult without a sense of touch, like lifting large and awkward objects. Here’s a photo of an early prototype sensor on Baloo while lifting a kayak:

This is pretty important when working closely with humans.