MuJoCo Simulation of Continuum Robots
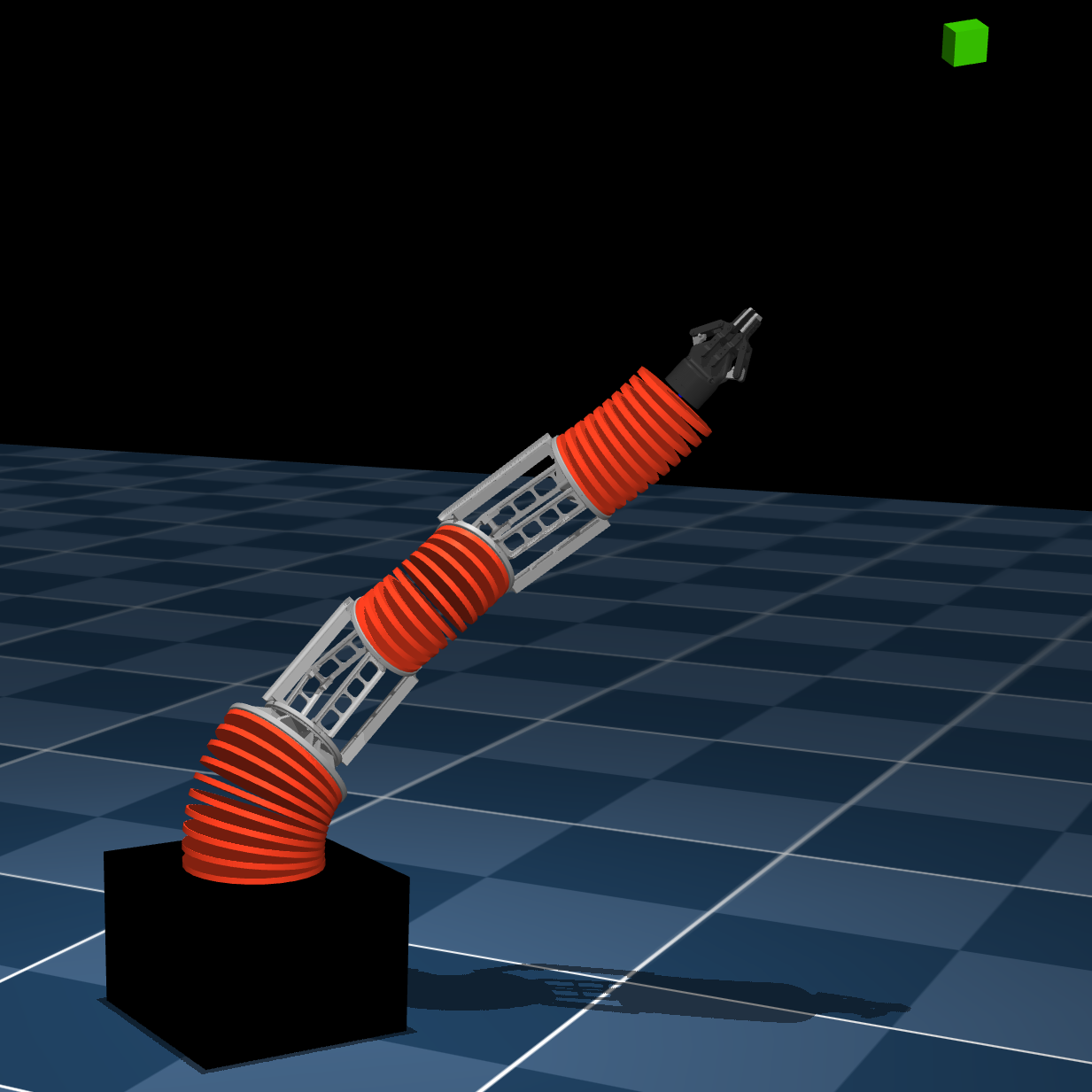
MuJoCo is a well-known physics engine that is used to simulate robotic systems. However, it is not designed to simulate soft continuum robots. I developed a novel way to simulate soft continuum robots in MuJoCo by using a series of rigid bodies connected by joints. This method allows for the simulation of soft continuum robots in MuJoCo.
We’ve used it to simulate highly dynamic tasks like throwing.
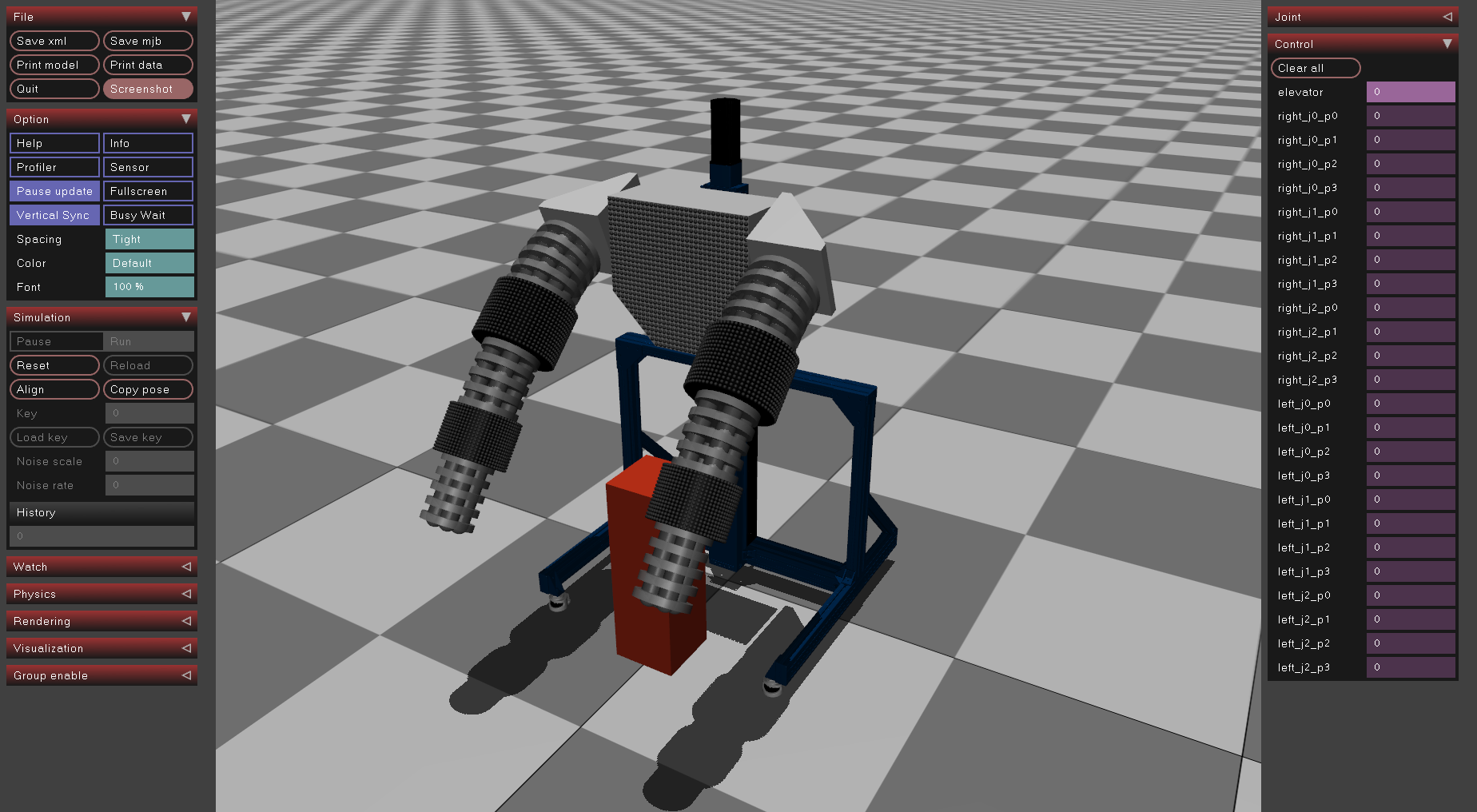
Currently, I’m using it to simulate Baloo, a soft robotic torso that I’m building for my PhD work. The simulation is used to develop control and planning algorithms for whole body manipulation.